| 8.3. Stały napęd wszystkich kół z zastosowaniem zblokowanego układu napędowego. Większość obecnie produkowanych aut osobowych i Suv posiada stały napęd osi przedniej z dołączanym napędem tylnym. Każdy lub większość producentów pojazdów posiada w swej ofercie auto przednionapędowe ze stałym napędem a dołączanym napędem tylnym. Rozwiązania przez nich wykorzystywane można rozmieścić w grupach, ale każdego z producentów cechuje zastosowanie danego odmiennego rozwiązania. Różnice w konstrukcji polegać będę głownie na zastosowaniu mechanizmów,wprowadzeniu elektroniki i specyficznego rozwiązania (np. HALDEX). Wprowadzenie elektroniki w układy napędowe sprawiły ze znacznie poprawiono i udoskonalono pierwotne wady i cechy aut ze stałym napędem na cztery koła. Oddzielna częścią mojej pracy będzie opis konstrukcji sprzęgieł wiskotycznych starszego i nowszego typu (HALDEX). Wyselekcjonować można grupy producentów korzystających z tych samych lub podobnych rozwiązań.Można wiec wyróżnić i zrealizować stały napęd na cztery koła na trzy możliwe sposoby: -miedzyosiowy mechanizm różnicowy (TORSEN) -planetarny miedzyosiowy mechanizm różnicowy o stałym rozdziale momentu obrotowego i z dodatkowym sprzęgłem wiskotycznym lub elektromagnetycznym sterowanym elektronicznie - sprzęgło wiskotyczne na wale napędowym lub zintegrowane z mostem, które powoduje załączenie nie napędzanej dotąd osi (przekazuje moment obrotowy). Planetarny mechanizm różnicowy Moment musi być doprowadzony do wszystkich, kol. Dlatego tez wyposażony on jest w miedzyosiowy mechanizm różnicowy umieszczony na wale napędowym pomiędzy przednia a tylna osią. Stosowany jest by wyrównać prędkości miedzy osiami. Przykładem takiego rozwiązania może być SUBARU. W układzie napędowym tej firmy zastosowano miedzyosiowy mechanizm różnicowy ze sprzęgłem lepkościowym, które umożliwia samoczynna blokadę mechanizmu różnicowego (12 - 40%)stopnia zblokowania. W przypadku różnicy prędkości miedzy osią przednia a tylna. W normalnej eksploatacji moment ten jest dzielony po 50%na każdą z osi. Przy tylnej osi znajduje się dodatkowo mechanizm różnicowy o zwiększonym tarciu wewnętrznym ze sprzęgłem lepkościowym. Umożliwia to płynne (bez szarpnięć)podzielenie momentu obrotowego na poszczególne koła(prawe lub lewe) w momencie poślizgu któregoś z nich. Istotnym urozmaiceniem konstrukcji jest silnik typu boxer. Daje to możliwość lepszego (prostoliniowego) wyprowadzenia momentu i przekazania go na wał napędowy. Powoduje to również stosunkowo lepsze i niskie rozmieszczenie środka ciężkości pojazdu. Sprawia to ze pojazd taki jest mniej wrażliwy na utratę stateczności bocznej, wysokiej kierowalności tj. przewidziane reakcje samochodu na polecenia kierowcy, zachowanie neutralności w trakcie jazdy na luku. Firma SUBARU zastosowała system hillhalder. Ułatwia on ruszanie pod gore utrzymując (po jednokrotnym wyłączeniu sprzęgła i naciśnięciu hamulca)ciśnienie w przewodach hamulcowych mimo zwolnienia nacisku na pedał hamulca. To rozwiązanie przenoszenia napędu i realizowanie napędu na cztery koła w autach tej firmy z powodzeniem jest realizowane zarówno w autach sportowych jak i przeznaczonych do normalnej eksploatacji. W najnowszym rozwiązaniu stosowanym w SUBARU IMPREZA nadal wykorzystuje miedzyosiowy mechanizm różnicowy, ale o rozdziale w proporcjach 36/64 (przód/tył).W trakcie poślizgu natomiast hydraulicznie sterowane sprzęgło wiskotyczne może zmienić proporcje na 50/50 a nawet, gdy zajdzie taka potrzeba na 80/20.Sterowanie hydrauliczne pozwala na znacznie szybsza reakcje niż sprzęgło wiskotyczne. Na temat sterowania i zasady działania jak tez sposobu przekazywania napędu z zastosowaniem tego sprzęgła opisze w osobnym rozdziale. Wersja z manualna skrzynia biegów ma stożkowy mechanizm rocznicowy (miedzyosiwy) i rozdziela moment obrotowy w przedziale 50/50 a sprzęgło pełni role blokady mechanizmu różnicowego. Lecz to za mało i rozwiązania są w stanie za pomocą stworzonego sterowania elektro-hydraulicznego dla centralnego mechanizmu różnicowego na zmianę charakterystyki auta za pomocą zmiany rozdziału momentu od 50/50 do 35/65 (przód/tył).W ułamku sekundy za pomocą potencjometru zmieniać można charakterystykę auta z neutralnej na nadsterowna i na odwrót. W autach o sportowych aspiracjach producenci wprowadzili stosowane od niedawna w autach WRC aktywne sterownie mostami napędowymi (tylnym) lub tez nazywane to jest aktywnym sterowaniem stabilnością pojazdu - AYC. Jest to elektronicznie sterowany tylny mechanizm różnicowy, który podobnie jak ESP - ma zapobiegać niezamierzonej zmianie toru jazdy. W odróżnieniu od ESP nie uruchamia hamulców, lecz zwiększa moment obrotowy na jednym z kół tak by stabilizować pojazd i przeciwdziałać momentowi obracającemu pojazd. Nowością natomiast w autach WRC jest ACD tzn. aktywnie sterowany centralny mechanizm różnicowy. Przygotowała go firma MITSUBISHI do modelu LANCER. Mechanizm rozdziela moment na osie w proporcji 50/50 i można go blokować w skali od 0 do 100% co daje efekt podobny do zmiany proporcji rozdziału momentu obrotowego. Czas reakcji obu mechanizmów liczy się w milisekundach. Do zalet ACD zaliczyć należy: - stabilizacja auta w trakcie hamowania; - na zakręcie nie blokowany mechanizm różnicowy (większa zwrotność). Na zakręcie pracuje natomiast AYC pozwala na możliwie największą sterowność. Na wyjściu z zakrętu automatycznie zwiększany stopień zablokowania centralnego mechanizmu różnicowego, co poprawia stabilność. Sterowanie ACD odbywa się za pomocą mikroprocesora na podstawie takich danych jak; - kat skrętu kierownicy; - boczna siłą bezwładności - stopień otwarcia przepustnicy; - prędkość pojazdu; - prędkość obrotu kół. Oba te rozwiązania elektroniczne powodują niesamowite zachowanie się auta zerowa neutralność, i prowadzenie. Dlatego tez są stosowane do aut rajdowych, ale i cywilnych. Niestety są one bardzo drogie, ale do nich pewnie należy przyszłość. Centralny mechanizm różnicowy wykorzystują tez producenci z klasycznym układem napędowym, lecz o tym w dalszej części pracy. 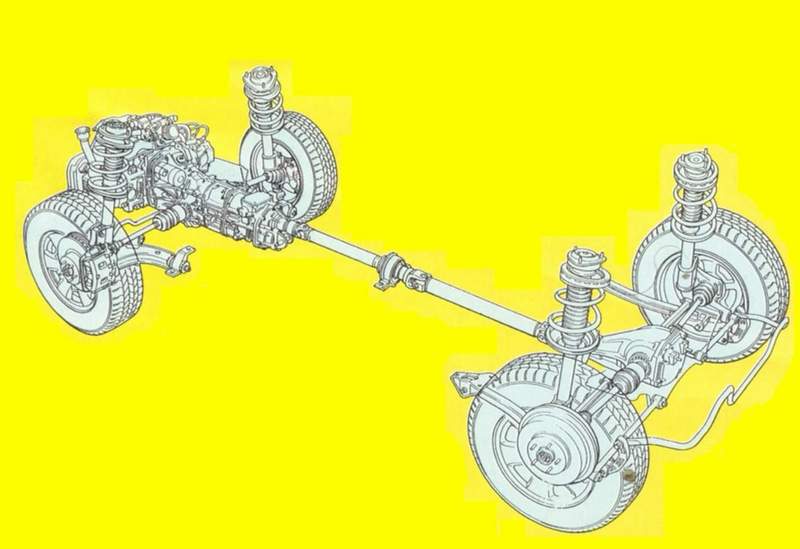
|